The arms race between autonomous navigation and adversarial interference operates on a brutal feedback loop. Every time an interception platform relies on a specific sensor to map physical space, adversaries find a way to spoof the data feeding into that sensor.
If your Autonomous Target Tracking (ATT) matrix relies purely on RGB feeds, bounding-box algorithms, or even basic LiDAR, you are operating on a vulnerable medium. At SkyGuard, we recognized that trying to out-process optical lies is a losing game. You don't filter the illusion; you bypass the visual feed entirely and isolate the math.
Here is how the landscape of sensor spoofing has evolved, and how the Optical Threat Isolation System (O.T.I.S.) renders these attacks obsolete.
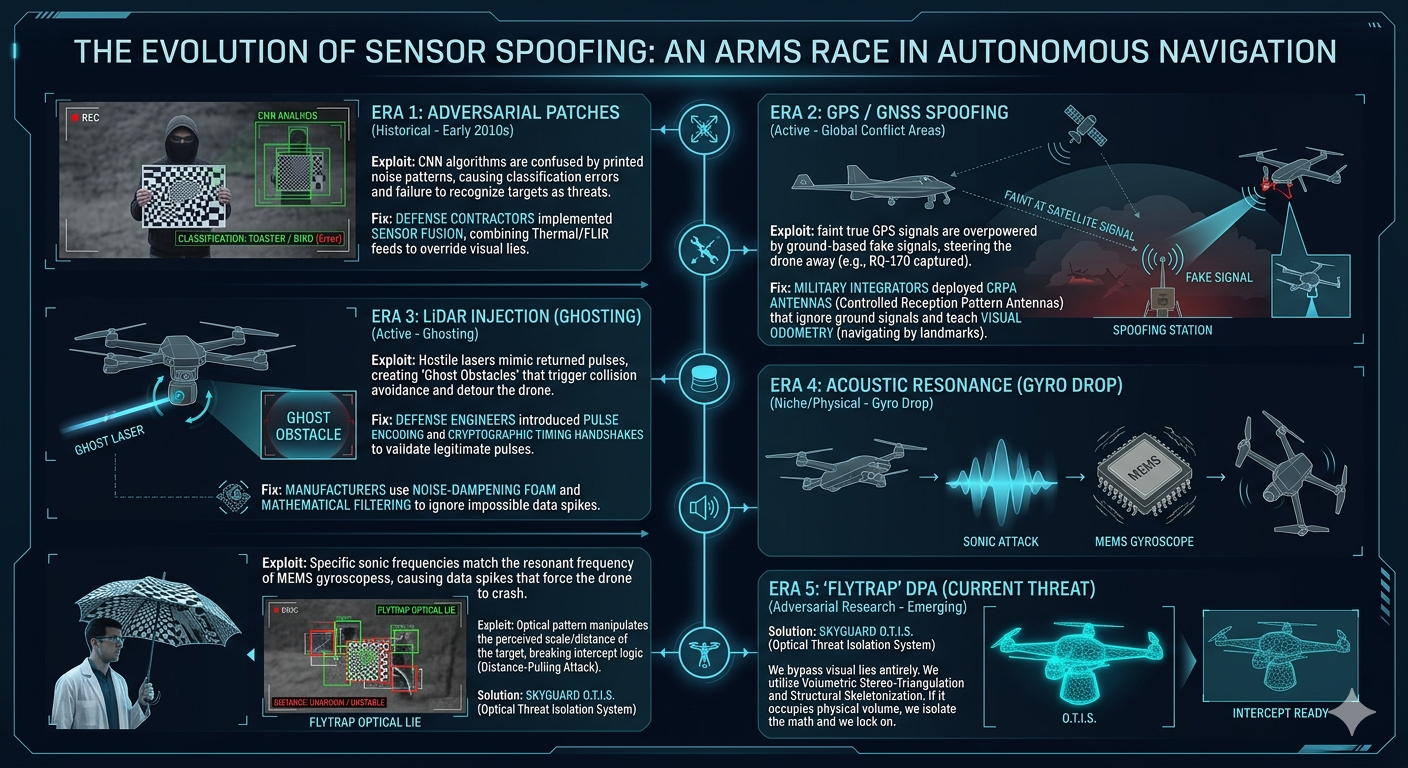
Generation 1: The Adversarial Patch (CNN Exploits)
Early autonomous tracking systems relied heavily on Convolutional Neural Networks (CNNs). These networks scan environments looking for specific textures and contrast gradients to classify objects.
Generation 2: GPS/GNSS Spoofing
As drones moved into BVLOS operations, adversaries attacked their fundamental understanding of location, overpowering faint satellite signals with fake ground-based coordinates.
Generation 3: LiDAR Injection (Ghosting)
As optical cameras proved vulnerable, defense platforms pivoted to LiDAR. Adversaries responded by injecting hostile lasers to project fake "ghost" walls into the drone's 3D mapping feed.
Generation 4: Acoustic Resonance (Gyro Drop)
Adversaries discovered that blasting specific acoustic frequencies forces MEMS gyroscopes into fatal resonance, causing drones to lose equilibrium and plummet from the sky.
Generation 5: The Distance-Pulling Attack (Flytrap)
The bleeding edge of optical interference. Instead of masking identity, DPA masks physical proximity, forcing the drone’s bounding-box to wildly miscalculate distance and scale.